Construir un robot mediante CNC (Control Numérico por Computadora) es un proceso que combina la fabricación de piezas mecánicas utilizando máquinas CNC y la integración de componentes electrónicos y sensores para dar vida al robot. A continuación, te describo el proceso general de construcción de un robot utilizando esta técnica:
- Diseño del robot: El primer paso es diseñar el robot en un software de modelado 3D. Aquí se definirán las dimensiones, la estructura mecánica, las articulaciones y los componentes electrónicos que se utilizarán. También se determinarán los movimientos y funcionalidades que el robot debe realizar.
- Selección de materiales: Con el diseño en mano, se seleccionan los materiales adecuados para construir el robot. Pueden ser metales, plásticos o una combinación de ambos, dependiendo de las necesidades del proyecto.
- Preparación de las piezas: Las piezas mecánicas del robot se fabrican utilizando máquinas CNC, que son controladas por software. Se cargan los diseños en el software de la máquina CNC y esta procede a cortar, perforar o mecanizar las piezas a partir de bloques de material en bruto.
- Ensamblaje de las partes mecánicas: Una vez que se han fabricado todas las piezas, se procede a su ensamblaje. Esto implica unir las partes mecánicas de manera que el robot pueda moverse según lo previsto en el diseño. En esta etapa, se pueden usar rodamientos, tornillos, tuercas y otros elementos para garantizar la estabilidad y movilidad del robot.
- Integración de componentes electrónicos: Luego de tener la estructura mecánica del robot, se instalan los componentes electrónicos, como motores, sensores, placas de circuito, baterías y controladores. Los motores son los que permitirán los movimientos del robot, mientras que los sensores le proporcionarán información sobre su entorno y estado.
- Programación del robot: Para que el robot funcione de manera autónoma o controlada por un operador, es necesario programar su comportamiento. Se utilizan lenguajes de programación específicos o entornos de programación dedicados para cargar el código en el controlador del robot y definir las acciones que debe realizar en respuesta a los estímulos que recibe de los sensores o del operador.
- Pruebas y ajustes: Una vez que el robot ha sido ensamblado y programado, se realizan pruebas para verificar que funciona según lo esperado. Si es necesario, se realizan ajustes en el diseño o en la programación para mejorar su desempeño.
- Optimización y mejoras: A medida que el robot se prueba y utiliza, pueden surgir oportunidades de optimización y mejoras. Estos cambios pueden incluir ajustes en el diseño, la incorporación de nuevos sensores o la implementación de algoritmos más sofisticados para mejorar su rendimiento y funcionalidad.
- Implementación final: Una vez que el robot ha pasado todas las pruebas y ajustes necesarios, se considera terminado y listo para su implementación en el entorno o tarea para la que fue diseñado.
Es importante tener en cuenta que el proceso de construcción de un robot en CNC puede variar dependiendo del tipo de robot que se esté desarrollando y la complejidad del proyecto. También es fundamental seguir los estándares de seguridad durante todo el proceso para evitar accidentes y garantizar un funcionamiento seguro del robot.
Peso: 1,2 Mb
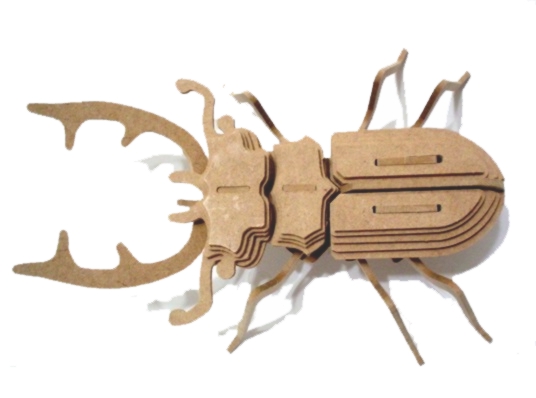
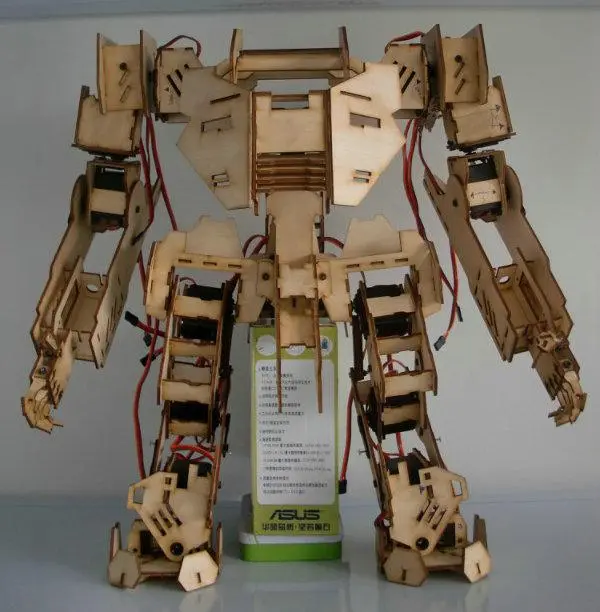
Te compartimos un vector descargable para reproducir el diseño de un robot armable, con mecanismo de movimiento.
Utiliza máquina de corte CNC para la realización de este proyecto.
Si crees que este archivo infringe algún derecho de autor o eres dueño del contenido, total o parcialmente, envíanos un mensaje.
Diseños listos para usar en máquinas de CORTE LASER o ROUTER CNC Se trabajan con MDF o Acrílico según el diseño y las posibilidades de tu máquina (ver superficie de corte). Ideal para uso propio o emprendimientos.